SISTEMAS DE REPRESENTACIÓN
Sistemas de Representación
Unidad 5
3• SISTEMAS DE REPRESENTACIÓN
Cuando el objeto proyectado reproduce una imagen del mismo con sus dimensiones en verdadera magnitud, el sistema se denomina de sistema de medida, en caso contrario se llama sistema perspectivo.
3.1 Sistemas de Medida
Sistema diédrico o de Monge. Nombre que toma del matemático y científico francés Gaspard Monge (1746 -1818) quién se planteó cómo representar los objetos de forma clara para su construcción. El resultado de sus estudios es la Geometría Descriptiva, y en concreto el Sistema Diédrico, cuyo conocimiento permite representar los objetos y abordar con mayor facilidad el estudio de los demás Sistemas de Representación.
El Sistema Diédrico (del Griego Di = dos y Hedra = cara) es el procedimiento de representación basado en la proyección cilíndrica ortogonal sobre, fundamentalmente, dos planos perpendiculares, denominados horizontal y vertical de proyección (designados por H y V respectivamente), que dividen al espacio en cuatro cuadrantes o diedros. Los elementos a representar en las dos posiciones normalizadas corresponden a objetos ubicados en el primer diedro (Sistema Europeo) o en el tercero ( Sistema Americano). La línea de intersección de los planos H yV se denomina línea de tierra (LT) o línea de plegamiento del plano horizontal sobre el vertical.
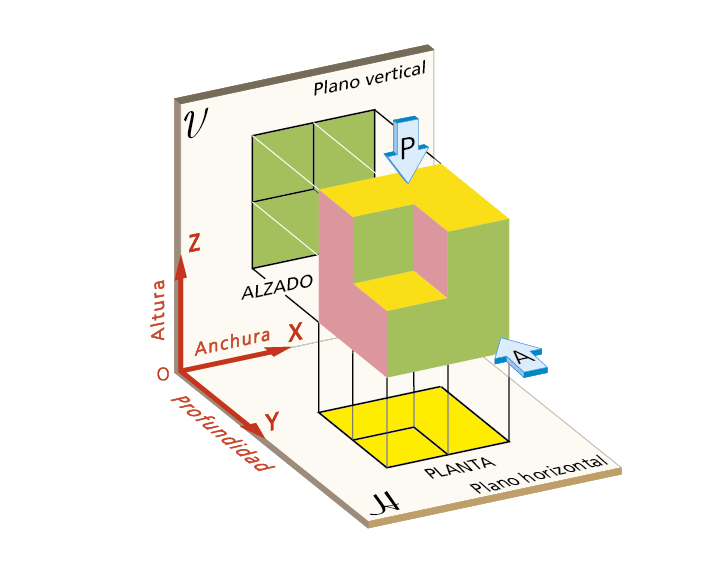
Figura en el primer diedro proyectada sobre los planos horizontal (H ) y vertical (V ) o plano del papel.
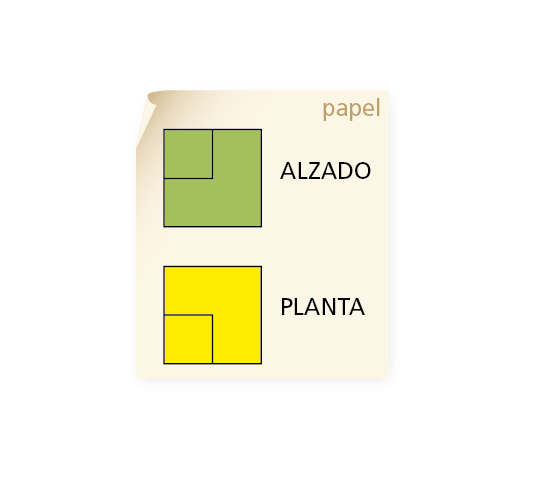
La disposición de las dos vistas sobre el plano del dibujo.
3.1.2. Sistema de Planos acotados
Se emplea un único plano de proyección, considerado en posición horizontal y coincidente con el dibujo o paralelo a él. Se llama plano de referencia o comparación.
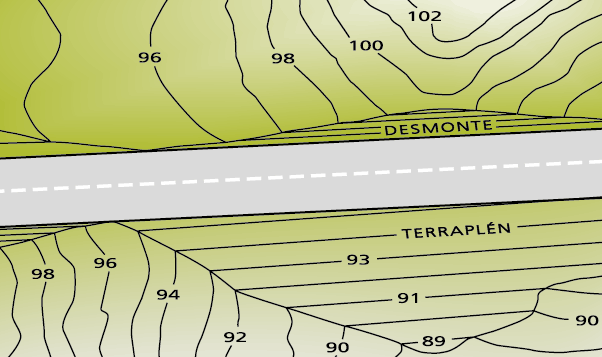
El tipo de proyección utilizada es cilíndrica ortogonal, hasta el punto que puede considerarse como un sistema diédrico del que se traza sólo la proyección horizontal. Para suplir la falta de la proyección vertical (alzado) se escribe en cifras sobre dicha proyección horizontal, la cota o altura del elemento referido.
Una de las aplicaciones principales de este sistema es la representación de superficies topográficas. El dibujo topográfico tiene por objeto el representar sobre un plano –el del dibujo– las características generales del relieve de los terrenos, valles, ríos, sembrados, etc.
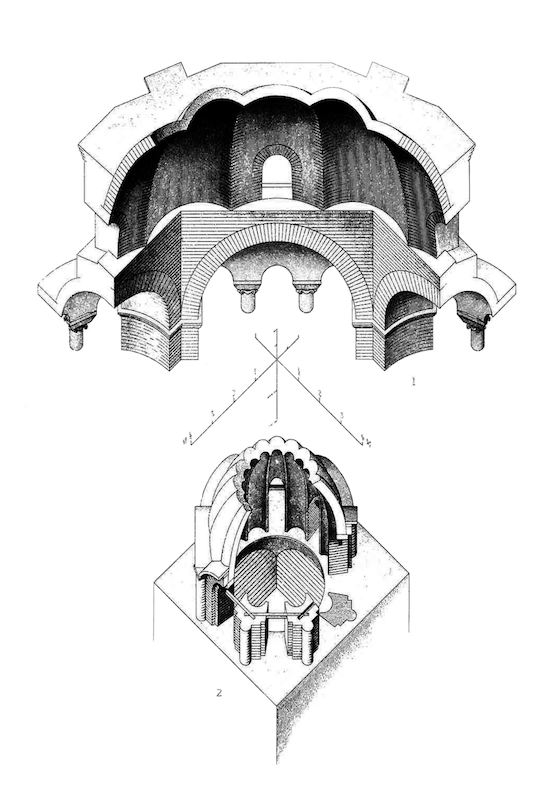
Auguste CHOISY (1841-1909).
Ilustración axonométrica de Santa Sofía de Constantinopla para su libro «Historia de la arquitectura», 1899.
Este libro presenta alrededor de 1700 ilustraciones axonométricas simplificadas de las arquitecturas de las distintas épocas relacionadas con sus contextos culturales y su evolución.
3.2 Sistema Perspectivos
3.2.1. Perspectiva axonométrica. Los sistemas axonométricos utilizan el tipo de proyección paralela (cilíndrica) en sus dos vertientes: ortogonal y oblicua. Lo que da lugar a la axonometría ortogonal en vsus tres variantes –isométrica, dimétrica y trimétrica –, y a la axonometría oblicua que origina la perspectiva caballera convencional y la perspectiva militar o planimétrica.
En los sistemas axonométricos sólo se considera un plano de proyección, percibiéndose conjuntamente las tres dimensiones del objeto, características de los dibujos en perspectiva. Este sistema probablemente sea menos científico que el diédrico, pero mucho más sencillo para ofrecer una visión instantánea del cuerpo representado. Se utiliza en arquitectura y en la industria para obtener niveles de percepción.
• Perspectiva axonométrica ortogonal. En este tipo de axonometría si cada eje coordenado (X, Y, Z) forma ángulos iguales con el plano del dibujo, la perspectiva toma el nombre de Isométrica; si dos de los ángulos son iguales, Dimétrica, y si los tres son distintos,Trimétrica.
• Perspectiva axonométrica oblicua. La axonometría oblicua se emplea, principalmente, en el caso particular de que uno de los planos coordenados coincida, o sea paralelo, con el plano del dibujo. Este sistema de denomina Perspectiva Caballera si el plano de proyección coincide con el vertical y Perspectiva Militar o Planimétrica si coincide con el plano horizontal.
3.2.2. Perspectiva cónica.
Llamado también perspectiva cónica o lineal, trata de representar la realidad que observamos desde un punto de vista fijo (ojo del observador o lente de una cámara). Los rayos visuales percibidos por el ojo son concurrentes en dicho punto, formando el cono visual. La imagen de los objetos se configura por la proyección del objeto sobre un único plano, llamado plano del cuadro o dibujo.
La aplicación de este sistema se centra fundamentalmente en la arquitectura y en la expresión gráfico-plástica del dibujo y la pintura. No obstante, grandes artistas como Leonardo Da Vinci o Durero han utilizado esta perspectiva en muchas de sus obras de ingeniería para dar una visual completa de un diseño.
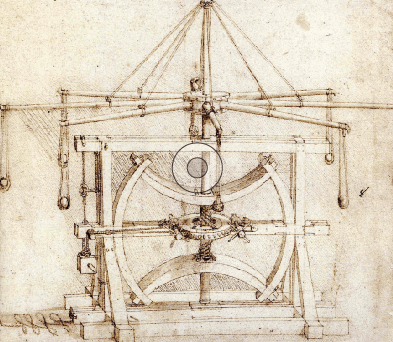
Leonardo DA VINCI (1452-1519).
Máquina de guerra del «Códice Atlántico», 1519.
Esta pieza de ingeniería diseñada en los inicios de la perspectiva cónica muestra un detallado boceto de un dispositivo para lanzar proyectiles de forma mecánica.
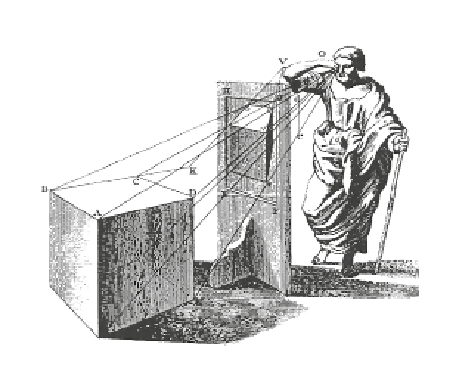
Brook Taylor (1685-1731)1719.
Grabado de León Battista Alberti describiendo sus estudios geométricos de perspectiva cónica en el siglo XV.